mirror of
https://github.com/Snailclimb/JavaGuide
synced 2025-08-01 16:28:03 +08:00
Merge pull request #2569 from 1020325258/12-21
[docs update]AQS增加共享模式获取、释放资源源码分析
This commit is contained in:
commit
00f5ee850a
@ -56,21 +56,21 @@ AQS(AbstractQueuedSynchronizer)在 CLH 锁的基础上进一步优化,形
|
||||
|
||||
#### AQS 的性能比较好,原因是什么?
|
||||
|
||||
因为 AQS 里使用了 `CAS` + `线程阻塞/唤醒` 。
|
||||
因为 AQS 内部大量使用了 `CAS` 操作。
|
||||
|
||||
在 AQS 的实现里,大量使用了 `CAS` 操作,`CAS` 基于内存地址直接进行数据修改,保证并发安全的同时,性能也很好。
|
||||
AQS 内部通过队列来存储等待的线程节点。由于队列是共享资源,在多线程场景下,需要保证队列的同步访问。
|
||||
|
||||
但是如果一直通过 `CAS` 操作来更新数据,会比较占用 CPU。因此 AQS 同时结合了 `CAS` 和 `线程的阻塞/唤醒` 机制,当 `CAS` 没有成功获取资源时,会对线程进行阻塞,避免一直空转占用 CPU 资源。
|
||||
AQS 内部通过 `CAS` 操作来控制队列的同步访问,`CAS` 操作主要用于控制 `队列初始化` 、 `线程节点入队` 两个操作的并发安全。虽然利用 `CAS` 控制并发安全可以保证比较好的性能,但同时会带来比较高的 **编码复杂度** 。
|
||||
|
||||
#### AQS 中为什么 Node 节点需要不同的状态?
|
||||
|
||||
AQS 中的 `waitStatus` 状态类似于 **状态机** ,通过不同状态来表明 Node 节点的不同含义,并且根据不同操作,来控制状态之间的流转。
|
||||
|
||||
在 AQS 中,一个节点加入队列之后,初始状态为 `0` 。
|
||||
- 状态 `0` :新节点加入队列之后,初始状态为 `0` 。
|
||||
|
||||
当有新的节点加入队列,此时新节点的前继节点状态就会由 `0` 更新为 `SIGNAL` ,表示前继节点释放锁之后,需要对新节点进行唤醒操作。
|
||||
- 状态 `SIGNAL` :当有新的节点加入队列,此时新节点的前继节点状态就会由 `0` 更新为 `SIGNAL` ,表示前继节点释放锁之后,需要对新节点进行唤醒操作。如果唤醒 `SIGNAL` 状态节点的后续节点,就会将 `SIGNAL` 状态更新为 `0` 。即通过清除 `SIGNAL` 状态,表示已经执行了唤醒操作。
|
||||
|
||||
如果一个节点在队列中等待获取锁锁时,因为某种原因失败了,该节点的状态就会变为 `CANCELLED` ,表明取消获取锁,这种状态的节点是异常的,无法被唤醒,也无法唤醒后继节点。
|
||||
- 状态 `CANCELLED` :如果一个节点在队列中等待获取锁锁时,因为某种原因失败了,该节点的状态就会变为 `CANCELLED` ,表明取消获取锁,这种状态的节点是异常的,无法被唤醒,也无法唤醒后继节点。
|
||||
|
||||
### AQS 核心思想
|
||||
|
||||
@ -135,19 +135,30 @@ protected final boolean compareAndSetState(int expect, int update) {
|
||||
|
||||
### Node 节点 waitStatus 状态含义
|
||||
|
||||
AQS 中的 `waitStatus` 状态类似于 **状态机** ,通过不同状态来表明 Node 节点的不同含义,并且根据不同操作,来控制状态之间的流转。
|
||||
|
||||
| Node 节点状态 | 值 | 含义 |
|
||||
| ------------- | --- | ------------------------------------------------------------------------------------------------------------------------- |
|
||||
| `CANCELLED` | 1 | 表示线程已经取消获取锁。线程在等待获取资源时被中断、等待资源超时会更新为该状态。 |
|
||||
| `SIGNAL` | -1 | 表示后继节点需要当前节点唤醒。在当前线程节点释放锁之后,需要对后继节点进行唤醒。 |
|
||||
| `CONDITION` | -2 | 表示节点在等待 Condition。当其他线程调用了 Condition 的 `signal()` 方法后,节点会从等待队列转移到同步队列中等待获取资源。 |
|
||||
| `PROPAGATE` | -3 | 用于共享模式,在共享模式下,前继节点不仅会唤醒后继节点,同时也可能会唤醒后继节点的后继节点。 |
|
||||
| `PROPAGATE` | -3 | 用于共享模式。在共享模式下,可能会出现线程在队列中无法被唤醒的情况,因此引入了 `PROPAGATE` 状态来解决这个问题。 |
|
||||
| | 0 | 加入队列的新节点的初始状态。 |
|
||||
|
||||
在 AQS 的源码中,经常使用 `> 0` 、 `< 0` 来对 `waitStatus` 进行判断。
|
||||
|
||||
如果 `waitStatus > 0` ,表明节点的状态已经取消等待获取资源。
|
||||
|
||||
如果 `waitStatus < 0` ,表明节点的处于有效的等待状态。
|
||||
如果 `waitStatus < 0` ,表明节点的状态处于正常的状态,即没有取消等待。
|
||||
|
||||
因此在 AQS 的源码中,经常使用 `> 0` 、 `< 0` 来对 `waitStatus` 进行判断。
|
||||
其中 `SIGNAL` 状态是最重要的,节点状态流转以及对应操作如下:
|
||||
|
||||
| 状态流转 | 对应操作 |
|
||||
| ---------------- | --------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| `0` | 新节点入队时,初始状态为 `0` 。 |
|
||||
| `0 -> SIGNAL` | 新节点入队时,它的前继节点状态会由 `0` 更新为 `SIGNAL` 。`SIGNAL` 状态表明该节点的后续节点需要被唤醒。 |
|
||||
| `SIGNAL -> 0` | 在唤醒后继节点时,需要清除当前节点的状态。通常发生在 `head` 节点,比如 `head` 节点的状态由 `SIGNAL` 更新为 `0` ,表示已经对 `head` 节点的后继节点唤醒了。 |
|
||||
| `0 -> PROPAGATE` | AQS 内部引入了 `PROPAGATE` 状态,为了解决并发场景下,可能造成的线程节点无法唤醒的情况。(在 AQS 共享模式获取资源的源码分析会讲到) |
|
||||
|
||||
### 自定义同步器
|
||||
|
||||
@ -200,7 +211,7 @@ public final void acquire(int arg) {
|
||||
|
||||
- `tryAcquire()` :尝试获取锁(模板方法),`AQS` 不提供具体实现,由子类实现。
|
||||
- `addWaiter()` :如果获取锁失败,会将当前线程封装为 Node 节点加入到 AQS 的 CLH 变体队列中等待获取锁。
|
||||
- `acquireQueued()` :对线程进行阻塞、唤醒,并调用 `tryAcquire()` 方法让队列中的线程尝试获取锁。
|
||||
- `acquireQueued()` :对线程进行阻塞,并调用 `tryAcquire()` 方法让队列中的线程尝试获取锁。
|
||||
|
||||
#### `tryAcquire()` 分析
|
||||
|
||||
@ -583,7 +594,7 @@ private Node addWaiter(Node mode) {
|
||||
|
||||
这样如果从 `head` 指针向后遍历,无法找到新入队的节点,因此需要从 `tail` 指针向前遍历找到新入队的节点。
|
||||
|
||||
### 图解 AQS 工作原理
|
||||
### 图解 AQS 工作原理(独占模式)
|
||||
|
||||
至此,AQS 中以独占模式获取资源、释放资源的源码就讲完了。为了对 AQS 的工作原理、节点状态变化有一个更加清晰的认识,接下来会通过画图的方式来了解整个 AQS 的工作原理。
|
||||
|
||||
@ -613,6 +624,306 @@ private Node addWaiter(Node mode) {
|
||||
|
||||
|
||||
|
||||
### AQS 资源获取源码分析(共享模式)
|
||||
|
||||
AQS 中以独占模式获取资源的入口方法是 `acquireShared()` ,如下:
|
||||
|
||||
```JAVA
|
||||
// AQS
|
||||
public final void acquireShared(int arg) {
|
||||
if (tryAcquireShared(arg) < 0)
|
||||
doAcquireShared(arg);
|
||||
}
|
||||
```
|
||||
|
||||
在 `acquireShared()` 方法中,会先尝试获取共享锁,如果获取失败,则将当前线程加入到队列中阻塞,等待唤醒后尝试获取共享锁,分别对应一下两个方法:`tryAcquireShared()` 和 `doAcquireShared()` 。
|
||||
|
||||
其中 `tryAcquireShared()` 方法是 AQS 提供的模板方法,由同步器来实现具体逻辑。因此这里以 `Semaphore` 为例,来分析共享模式下,如何获取资源。
|
||||
|
||||
#### `tryAcquireShared()` 分析
|
||||
|
||||
`Semaphore` 中实现了公平锁和非公平锁,接下来以非公平锁为例来分析 `tryAcquireShared()` 源码。
|
||||
|
||||
`Semaphore` 中重写的 `tryAcquireShared()` 方法会调用下边的 `nonfairTryAcquireShared()` 方法:
|
||||
|
||||
```JAVA
|
||||
// Semaphore 重写 AQS 的模板方法
|
||||
protected int tryAcquireShared(int acquires) {
|
||||
return nonfairTryAcquireShared(acquires);
|
||||
}
|
||||
|
||||
// Semaphore
|
||||
final int nonfairTryAcquireShared(int acquires) {
|
||||
for (;;) {
|
||||
// 1、获取可用资源数量。
|
||||
int available = getState();
|
||||
// 2、计算剩余资源数量。
|
||||
int remaining = available - acquires;
|
||||
// 3、如果剩余资源数量 < 0,则说明资源不足,直接返回;如果 CAS 更新 state 成功,则说明当前线程获取到了共享资源,直接返回。
|
||||
if (remaining < 0 ||
|
||||
compareAndSetState(available, remaining))
|
||||
return remaining;
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
在共享模式下,AQS 中的 `state` 值表示共享资源的数量。
|
||||
|
||||
在 `nonfairTryAcquireShared()` 方法中,会在死循环中不断尝试获取资源,如果 「剩余资源数不足」 或者 「当前线程成功获取资源」 ,就退出死循环。方法返回 **剩余的资源数量** ,根据返回值的不同,分为 3 种情况:
|
||||
|
||||
- **剩余资源数量 > 0** :表示成功获取资源,并且后续的线程也可以成功获取资源。
|
||||
- **剩余资源数量 = 0** :表示成功获取资源,但是后续的线程无法成功获取资源。
|
||||
- **剩余资源数量 < 0** :表示获取资源失败。
|
||||
|
||||
#### `doAcquireShared()` 分析
|
||||
|
||||
为了方便阅读,这里再贴一下获取资源的入口方法 `acquireShared()` :
|
||||
|
||||
```JAVA
|
||||
// AQS
|
||||
public final void acquireShared(int arg) {
|
||||
if (tryAcquireShared(arg) < 0)
|
||||
doAcquireShared(arg);
|
||||
}
|
||||
```
|
||||
|
||||
在 `acquireShared()` 方法中,会先通过 `tryAcquireShared()` 尝试获取资源。
|
||||
|
||||
如果发现方法的返回值 `< 0` ,即剩余的资源数小于 0,则表明当前线程获取资源失败。因此会进入 `doAcquireShared()` 方法,将当前线程加入到 AQS 队列进行等待。如下:
|
||||
|
||||
```JAVA
|
||||
// AQS
|
||||
private void doAcquireShared(int arg) {
|
||||
// 1、将当前线程加入到队列中等待。
|
||||
final Node node = addWaiter(Node.SHARED);
|
||||
boolean failed = true;
|
||||
try {
|
||||
boolean interrupted = false;
|
||||
for (;;) {
|
||||
final Node p = node.predecessor();
|
||||
if (p == head) {
|
||||
// 2、如果当前线程是等待队列的第一个节点,则尝试获取资源。
|
||||
int r = tryAcquireShared(arg);
|
||||
if (r >= 0) {
|
||||
// 3、将当前线程节点移出等待队列,并唤醒后续线程节点。
|
||||
setHeadAndPropagate(node, r);
|
||||
p.next = null; // help GC
|
||||
if (interrupted)
|
||||
selfInterrupt();
|
||||
failed = false;
|
||||
return;
|
||||
}
|
||||
}
|
||||
if (shouldParkAfterFailedAcquire(p, node) &&
|
||||
parkAndCheckInterrupt())
|
||||
interrupted = true;
|
||||
}
|
||||
} finally {
|
||||
// 3、如果获取资源失败,就会取消获取资源,将节点状态更新为 CANCELLED。
|
||||
if (failed)
|
||||
cancelAcquire(node);
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
由于当前线程已经尝试获取资源失败了,因此在 `doAcquireShared()` 方法中,需要将当前线程封装为 Node 节点,加入到队列中进行等待。
|
||||
|
||||
以 **共享模式** 获取资源和 **独占模式** 获取资源最大的不同之处在于:共享模式下,资源的数量可能会大于 1,即可以多个线程同时持有资源。
|
||||
|
||||
因此在共享模式下,当线程线程被唤醒之后,获取到了资源,如果发现还存在剩余资源,就会尝试唤醒后边的线程去尝试获取资源。对应的 `setHeadAndPropagate()` 方法如下:
|
||||
|
||||
```JAVA
|
||||
// AQS
|
||||
private void setHeadAndPropagate(Node node, int propagate) {
|
||||
Node h = head;
|
||||
// 1、将当前线程节点移出等待队列。
|
||||
setHead(node);
|
||||
// 2、唤醒后续等待节点。
|
||||
if (propagate > 0 || h == null || h.waitStatus < 0 ||
|
||||
(h = head) == null || h.waitStatus < 0) {
|
||||
Node s = node.next;
|
||||
if (s == null || s.isShared())
|
||||
doReleaseShared();
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
在 `setHeadAndPropagate()` 方法中,唤醒后续节点需要满足一定的条件,主要需要满足 2 个条件:
|
||||
|
||||
- `propagate > 0` :`propagate` 代表获取资源之后剩余的资源数量,如果 `> 0` ,则可以唤醒后续线程去获取资源。
|
||||
- `h.waitStatus < 0` :这里的 `h` 节点是执行 `setHead()` 之前的 `head` 节点。判断 `head.waitStatus` 时使用 `< 0` ,主要为了确定 `head` 节点的状态为 `SIGNAL` 或 `PROPAGATE` 。如果 `head` 节点为 `SIGNAL` ,则可以唤醒后续节点;如果 `head` 节点状态为 `PROPAGATE` ,也可以唤醒后续节点(这是为了解决并发场景下出现的问题,后续会细讲)。
|
||||
|
||||
代码中关于 **唤醒后续等待节点** 的 `if` 判断稍微复杂一些,这里来讲一下为什么这样写:
|
||||
|
||||
```JAVA
|
||||
if (propagate > 0 || h == null || h.waitStatus < 0 ||
|
||||
(h = head) == null || h.waitStatus < 0)
|
||||
```
|
||||
|
||||
- `h == null || h.waitStatus < 0` : `h == null` 用于防止空指针异常。正常情况下 h 不会为 `null` ,因为执行到这里之前,当前节点已经加入到队列中了,队列不可能还没有初始化。
|
||||
|
||||
`h.waitStatus < 0` 主要判断 `head` 节点的状态是否为 `SIGNAL` 或者 `PROPAGATE` ,直接使用 `< 0` 来判断比较方便。
|
||||
|
||||
- `(h = head) == null || h.waitStatus < 0` :如果到这里说明之前判断的 `h.waitStatus < 0` ,说明存在并发。
|
||||
|
||||
同时存在其他线程在唤醒后续节点,已经将 `head` 节点的值由 `SIGNAL` 修改为 `0` 了。因此,这里重新获取新的 `head` 节点,这次获取的 `head` 节点为通过 `setHead()` 设置的当前线程节点,之后再次判断 `waitStatus` 状态。
|
||||
|
||||
如果 `if` 条件判断通过,就会走到 `doReleaseShared()` 方法唤醒后续等待节点,如下:
|
||||
|
||||
```JAVA
|
||||
private void doReleaseShared() {
|
||||
for (;;) {
|
||||
Node h = head;
|
||||
// 1、队列中至少需要一个等待的线程节点。
|
||||
if (h != null && h != tail) {
|
||||
int ws = h.waitStatus;
|
||||
// 2、如果 head 节点的状态为 SIGNAL,则可以唤醒后继节点。
|
||||
if (ws == Node.SIGNAL) {
|
||||
// 2.1 清除 head 节点的 SIGNAL 状态,更新为 0。表示已经唤醒该节点的后继节点了。
|
||||
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
|
||||
continue;
|
||||
// 2.2 唤醒后继节点
|
||||
unparkSuccessor(h);
|
||||
}
|
||||
// 3、如果 head 节点的状态为 0,则更新为 PROPAGATE。这是为了解决并发场景下存在的问题,接下来会细讲。
|
||||
else if (ws == 0 &&
|
||||
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
|
||||
continue;
|
||||
}
|
||||
if (h == head)
|
||||
break;
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
在 `doReleaseShared()` 方法中,会判断 `head` 节点的 `waitStatus` 状态来决定接下来的操作,有两种情况:
|
||||
|
||||
- `head` 节点的状态为 `SIGNAL` :表明 `head` 节点存在后继节点需要唤醒,因此通过 `CAS` 操作将 `head` 节点的 `SIGNAL` 状态更新为 `0` 。通过清除 `SIGNAL` 状态来表示已经对 `head` 节点的后继节点进行唤醒操作了。
|
||||
- `head` 节点的状态为 `0` :表明存在并发情况,需要将 `0` 修改为 `PROPAGATE` 来保证在并发场景下可以正常唤醒线程。
|
||||
|
||||
#### 为什么需要 `PROPAGATE` 状态?
|
||||
|
||||
在 `doReleaseShared()` 释放资源时,第 3 步不太容易理解,即如果发现 `head` 节点的状态是 `0` ,就将 `head` 节点的状态由 `0` 更新为 `PROPAGATE` 。
|
||||
|
||||
AQS 中,Node 节点的 `PROPAGATE` 就是为了处理并发场景下可能出现的无法唤醒线程节点的问题。`PROPAGATE` 只在 `doReleaseShared()` 方法中用到一次。
|
||||
|
||||
**接下来通过案例分析,为什么需要 `PROPAGATE` 状态?**
|
||||
|
||||
在共享模式下,线程获取和释放资源的方法调用链如下:
|
||||
|
||||
- 线程获取资源的方法调用链为: `acquireShared() -> tryAcquireShared() -> 线程阻塞等待唤醒 -> tryAcquireShared() -> setHeadAndPropagate() -> if (剩余资源数 > 0) || (head.waitStatus < 0) 则唤醒后续节点` 。
|
||||
|
||||
- 线程释放资源的方法调用链为: `releaseShared() -> tryReleaseShared() -> doReleaseShared()` 。
|
||||
|
||||
**如果在释放资源时,没有将 `head` 节点的状态由 `0` 改为 `PROPAGATE` :**
|
||||
|
||||
假设总共有 4 个线程尝试以共享模式获取资源,总共有 2 个资源。初始 `T3` 和 `T4` 线程获取到了资源,`T1` 和 `T2` 线程没有获取到,因此在队列中排队等候。
|
||||
|
||||
- 在时刻 1 时,线程 `T1` 和 `T2` 在等待队列中,`T3` 和 `T4` 持有资源。此时等待队列内节点以及对应状态为(括号内为节点的 `waitStatus` 状态):
|
||||
|
||||
`head(-1) -> T1(-1) -> T2(0)` 。
|
||||
|
||||
- 在时刻 2 时,线程 `T3` 释放资源,通过 `doReleaseShared()` 方法将 `head` 节点的状态由 `SIGNAL` 更新为 `0` ,并唤醒线程 `T1` ,之后线程 `T3` 退出。
|
||||
|
||||
线程 `T1` 被唤醒之后,通过 `tryAcquireShared()` 获取到资源,但是此时还未来得及执行 `setHeadAndPropagate()` 将自己设置为 `head` 节点。此时等待队列内节点状态为:
|
||||
|
||||
`head(0) -> T1(-1) -> T2(0)` 。
|
||||
|
||||
- 在时刻 3 时,线程 `T4` 释放资源, 由于此时 `head` 节点的状态为 `0` ,因此在 `doReleaseShared()` 方法中无法唤醒 `head` 的后继节点, 之后线程 `T4` 退出。
|
||||
|
||||
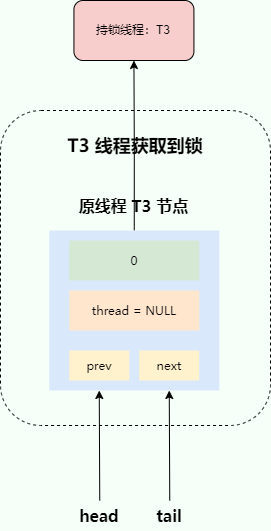
- 在时刻 4 时,线程 `T1` 继续执行 `setHeadAndPropagate()` 方法将自己设置为 `head` 节点。
|
||||
|
||||
但是此时由于线程 `T1` 执行 `tryAcquireShared()` 方法返回的剩余资源数为 `0` ,并且 `head` 节点的状态为 `0` ,因此线程 `T1` 并不会在 `setHeadAndPropagate()` 方法中唤醒后续节点。此时等待队列内节点状态为:
|
||||
|
||||
`head(-1,线程 T1 节点) -> T2(0)` 。
|
||||
|
||||
此时,就导致线程 `T2` 节点在等待队列中,无法被唤醒。对应时刻表如下:
|
||||
|
||||
| 时刻 | 线程 T1 | 线程 T2 | 线程 T3 | 线程 T4 | 等待队列 |
|
||||
| ------ | -------------------------------------------------------------- | -------- | ---------------- | ------------------------------------------------------------- | --------------------------------- |
|
||||
| 时刻 1 | 等待队列 | 等待队列 | 持有资源 | 持有资源 | `head(-1) -> T1(-1) -> T2(0)` |
|
||||
| 时刻 2 | (执行)被唤醒后,获取资源,但未来得及将自己设置为 `head` 节点 | 等待队列 | (执行)释放资源 | 持有资源 | `head(0) -> T1(-1) -> T2(0)` |
|
||||
| 时刻 3 | | 等待队列 | 已退出 | (执行)释放资源。但 `head` 节点状态为 `0` ,无法唤醒后继节点 | `head(0) -> T1(-1) -> T2(0)` |
|
||||
| 时刻 4 | (执行)将自己设置为 `head` 节点 | 等待队列 | 已退出 | 已退出 | `head(-1,线程 T1 节点) -> T2(0)` |
|
||||
|
||||
**如果在线程释放资源时,将 `head` 节点的状态由 `0` 改为 `PROPAGATE` ,则可以解决上边出现的并发问题,如下:**
|
||||
|
||||
- 在时刻 1 时,线程 `T1` 和 `T2` 在等待队列中,`T3` 和 `T4` 持有资源。此时等待队列内节点以及对应状态为:
|
||||
|
||||
`head(-1) -> T1(-1) -> T2(0)` 。
|
||||
|
||||
- 在时刻 2 时,线程 `T3` 释放资源,通过 `doReleaseShared()` 方法将 `head` 节点的状态由 `SIGNAL` 更新为 `0` ,并唤醒线程 `T1` ,之后线程 `T3` 退出。
|
||||
|
||||
线程 `T1` 被唤醒之后,通过 `tryAcquireShared()` 获取到资源,但是此时还未来得及执行 `setHeadAndPropagate()` 将自己设置为 `head` 节点。此时等待队列内节点状态为:
|
||||
|
||||
`head(0) -> T1(-1) -> T2(0)` 。
|
||||
|
||||
- 在时刻 3 时,线程 `T4` 释放资源, 由于此时 `head` 节点的状态为 `0` ,因此在 `doReleaseShared()` 方法中会将 `head` 节点的状态由 `0` 更新为 `PROPAGATE` , 之后线程 `T4` 退出。此时等待队列内节点状态为:
|
||||
|
||||
`head(PROPAGATE) -> T1(-1) -> T2(0)` 。
|
||||
|
||||
- 在时刻 4 时,线程 `T1` 继续执行 `setHeadAndPropagate()` 方法将自己设置为 `head` 节点。此时等待队列内节点状态为:
|
||||
|
||||
`head(-1,线程 T1 节点) -> T2(0)` 。
|
||||
|
||||
- 在时刻 5 时,虽然此时由于线程 `T1` 执行 `tryAcquireShared()` 方法返回的剩余资源数为 `0` ,但是 `head` 节点状态为 `PROPAGATE < 0` (这里的 `head` 节点是老的 `head` 节点,而不是刚成为 `head` 节点的线程 `T1` 节点)。
|
||||
|
||||
因此线程 `T1` 会在 `setHeadAndPropagate()` 方法中唤醒后续 `T2` 节点,并将 `head` 节点的状态由 `SIGNAL` 更新为 `0`。此时等待队列内节点状态为:
|
||||
|
||||
`head(0,线程 T1 节点) -> T2(0)` 。
|
||||
|
||||
- 在时刻 6 时,线程 `T2` 被唤醒后,获取到资源,并将自己设置为 `head` 节点。此时等待队列内节点状态为:
|
||||
|
||||
`head(0,线程 T2 节点)` 。
|
||||
|
||||
有了 `PROPAGATE` 状态,就可以避免线程 `T2` 无法被唤醒的情况。对应时刻表如下:
|
||||
|
||||
| 时刻 | 线程 T1 | 线程 T2 | 线程 T3 | 线程 T4 | 等待队列 |
|
||||
| ------ | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ------------------------------------------------------------------ | ---------------- | ------------------------------------------------------------------- | ------------------------------------ |
|
||||
| 时刻 1 | 等待队列 | 等待队列 | 持有资源 | 持有资源 | `head(-1) -> T1(-1) -> T2(0)` |
|
||||
| 时刻 2 | (执行)被唤醒后,获取资源,但未来得及将自己设置为 `head` 节点 | 等待队列 | (执行)释放资源 | 持有资源 | `head(0) -> T1(-1) -> T2(0)` |
|
||||
| 时刻 3 | 未继续向下执行 | 等待队列 | 已退出 | (执行)释放资源。此时会将 `head` 节点状态由 `0` 更新为 `PROPAGATE` | `head(PROPAGATE) -> T1(-1) -> T2(0)` |
|
||||
| 时刻 4 | (执行)将自己设置为 `head` 节点 | 等待队列 | 已退出 | 已退出 | `head(-1,线程 T1 节点) -> T2(0)` |
|
||||
| 时刻 5 | (执行)由于 `head` 节点状态为 `PROPAGATE < 0` ,因此会在 `setHeadAndPropagate()` 方法中唤醒后续节点,此时将新的 `head` 节点的状态由 `SIGNAL` 更新为 `0` ,并唤醒线程 `T2` | 等待队列 | 已退出 | 已退出 | `head(0,线程 T1 节点) -> T2(0)` |
|
||||
| 时刻 6 | 已退出 | (执行)线程 `T2` 被唤醒后,获取到资源,并将自己设置为 `head` 节点 | 已退出 | 已退出 | `head(0,线程 T2 节点)` |
|
||||
|
||||
### AQS 资源释放源码分析(共享模式)
|
||||
|
||||
AQS 中以共享模式释放资源的入口方法是 `releaseShared()` ,代码如下:
|
||||
|
||||
```JAVA
|
||||
// AQS
|
||||
public final boolean releaseShared(int arg) {
|
||||
if (tryReleaseShared(arg)) {
|
||||
doReleaseShared();
|
||||
return true;
|
||||
}
|
||||
return false;
|
||||
}
|
||||
```
|
||||
|
||||
其中 `tryReleaseShared()` 方法是 AQS 提供的模板方法,这里同样以 `Semaphore` 来讲解,如下:
|
||||
|
||||
```JAVA
|
||||
// Semaphore
|
||||
protected final boolean tryReleaseShared(int releases) {
|
||||
for (;;) {
|
||||
int current = getState();
|
||||
int next = current + releases;
|
||||
if (next < current) // overflow
|
||||
throw new Error("Maximum permit count exceeded");
|
||||
if (compareAndSetState(current, next))
|
||||
return true;
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
在 `Semaphore` 实现的 `tryReleaseShared()` 方法中,会在死循环内不断尝试释放资源,即通过 `CAS` 操作来更新 `state` 值。
|
||||
|
||||
如果更新成功,则证明资源释放成功,会进入到 `doReleaseShared()` 方法。
|
||||
|
||||
`doReleaseShared()` 方法在前文获取资源(共享模式)的部分已进行了详细的源码分析,此处不再重复。
|
||||
|
||||
## 常见同步工具类
|
||||
|
||||
下面介绍几个基于 AQS 的常见同步工具类。
|
||||
|
||||
@ -895,34 +895,40 @@ CompletableFuture.runAsync(() -> {
|
||||
|
||||
## AQS
|
||||
|
||||
关于 AQS 源码的详细分析,可以看看这一篇文章:[AQS 详解](./aqs.md)。
|
||||
|
||||
### AQS 是什么?
|
||||
|
||||
AQS 的全称为 `AbstractQueuedSynchronizer` ,翻译过来的意思就是抽象队列同步器。这个类在 `java.util.concurrent.locks` 包下面。
|
||||
AQS (`AbstractQueuedSynchronizer` ,抽象队列同步器)是从 JDK1.5 开始提供的 Java 并发核心组件。
|
||||
|
||||

|
||||
AQS 解决了开发者在实现同步器时的复杂性问题。它提供了一个通用框架,用于实现各种同步器,例如 **可重入锁**(`ReentrantLock`)、**信号量**(`Semaphore`)和 **倒计时器**(`CountDownLatch`)。通过封装底层的线程同步机制,AQS 将复杂的线程管理逻辑隐藏起来,使开发者只需专注于具体的同步逻辑。
|
||||
|
||||
AQS 就是一个抽象类,主要用来构建锁和同步器。
|
||||
|
||||
```java
|
||||
public abstract class AbstractQueuedSynchronizer extends AbstractOwnableSynchronizer implements java.io.Serializable {
|
||||
}
|
||||
```
|
||||
|
||||
AQS 为构建锁和同步器提供了一些通用功能的实现,因此,使用 AQS 能简单且高效地构造出应用广泛的大量的同步器,比如我们提到的 `ReentrantLock`,`Semaphore`,其他的诸如 `ReentrantReadWriteLock`,`SynchronousQueue`等等皆是基于 AQS 的。
|
||||
简单来说,AQS 是一个抽象类,为同步器提供了通用的 **执行框架**。它定义了 **资源获取和释放的通用流程**,而具体的资源获取逻辑则由具体同步器通过重写模板方法来实现。 因此,可以将 AQS 看作是同步器的 **基础“底座”**,而同步器则是基于 AQS 实现的 **具体“应用”**。
|
||||
|
||||
### ⭐️AQS 的原理是什么?
|
||||
|
||||
AQS 核心思想是,如果被请求的共享资源空闲,则将当前请求资源的线程设置为有效的工作线程,并且将共享资源设置为锁定状态。如果被请求的共享资源被占用,那么就需要一套线程阻塞等待以及被唤醒时锁分配的机制,这个机制 AQS 是用 **CLH 队列锁** 实现的,即将暂时获取不到锁的线程加入到队列中。
|
||||
AQS 核心思想是,如果被请求的共享资源空闲,则将当前请求资源的线程设置为有效的工作线程,并且将共享资源设置为锁定状态。如果被请求的共享资源被占用,那么就需要一套线程阻塞等待以及被唤醒时锁分配的机制,这个机制 AQS 是基于 **CLH 锁** (Craig, Landin, and Hagersten locks) 进一步优化实现的。
|
||||
|
||||
CLH(Craig,Landin,and Hagersten) 队列是一个虚拟的双向队列(虚拟的双向队列即不存在队列实例,仅存在结点之间的关联关系)。AQS 是将每条请求共享资源的线程封装成一个 CLH 锁队列的一个结点(Node)来实现锁的分配。在 CLH 同步队列中,一个节点表示一个线程,它保存着线程的引用(thread)、 当前节点在队列中的状态(waitStatus)、前驱节点(prev)、后继节点(next)。
|
||||
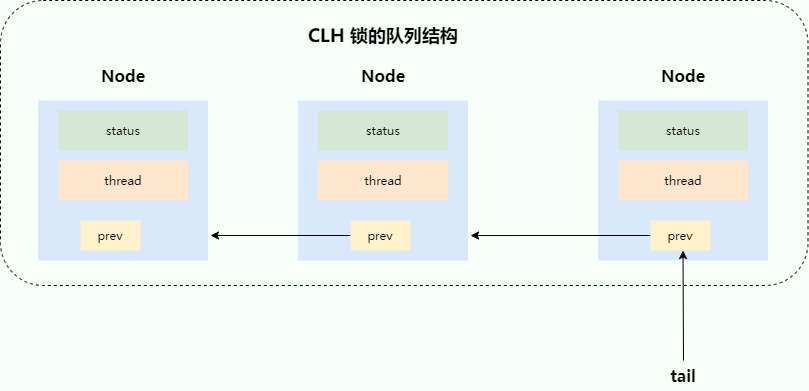
**CLH 锁** 对自旋锁进行了改进,是基于单链表的自旋锁。在多线程场景下,会将请求获取锁的线程组织成一个单向队列,每个等待的线程会通过自旋访问前一个线程节点的状态,前一个节点释放锁之后,当前节点才可以获取锁。**CLH 锁** 的队列结构如下图所示。
|
||||
|
||||
CLH 队列结构如下图所示:
|
||||
|
||||
|
||||
|
||||
AQS 中使用的 **等待队列** 是 CLH 锁队列的变体(接下来简称为 CLH 变体队列)。
|
||||
|
||||
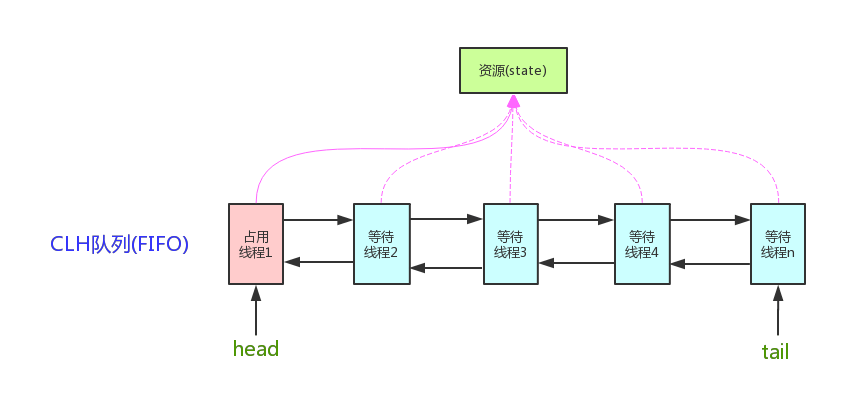
AQS(`AbstractQueuedSynchronizer`)的核心原理图(图源[Java 并发之 AQS 详解](https://www.cnblogs.com/waterystone/p/4920797.html))如下:
|
||||
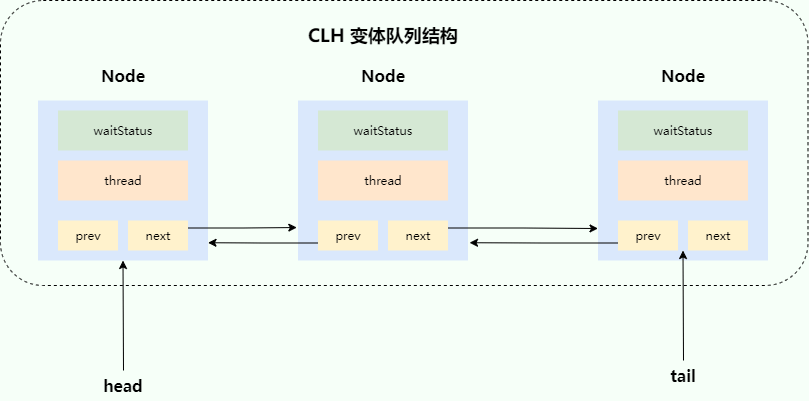
AQS 的 CLH 变体队列是一个双向队列,会暂时获取不到锁的线程将被加入到该队列中,CLH 变体队列和原本的 CLH 锁队列的区别主要有两点:
|
||||
|
||||
|
||||
- 由 **自旋** 优化为 **自旋 + 阻塞** :自旋操作的性能很高,但大量的自旋操作比较占用 CPU 资源,因此在 CLH 变体队列中会先通过自旋尝试获取锁,如果失败再进行阻塞等待。
|
||||
- 由 **单向队列** 优化为 **双向队列** :在 CLH 变体队列中,会对等待的线程进行阻塞操作,当队列前边的线程释放锁之后,需要对后边的线程进行唤醒,因此增加了 `next` 指针,成为了双向队列。
|
||||
|
||||
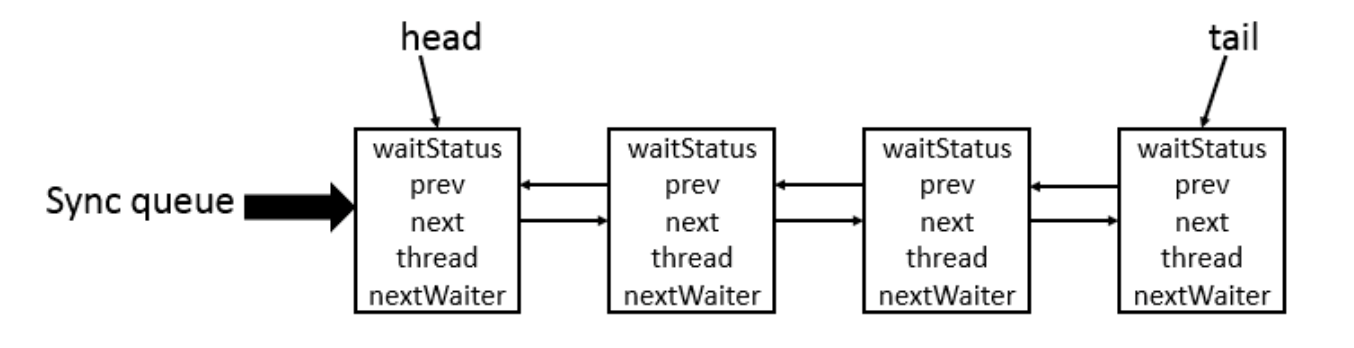
AQS 将每条请求共享资源的线程封装成一个 CLH 变体队列的一个结点(Node)来实现锁的分配。在 CLH 变体队列中,一个节点表示一个线程,它保存着线程的引用(thread)、 当前节点在队列中的状态(waitStatus)、前驱节点(prev)、后继节点(next)。
|
||||
|
||||
AQS 中的 CLH 变体队列结构如下图所示:
|
||||
|
||||
|
||||
|
||||
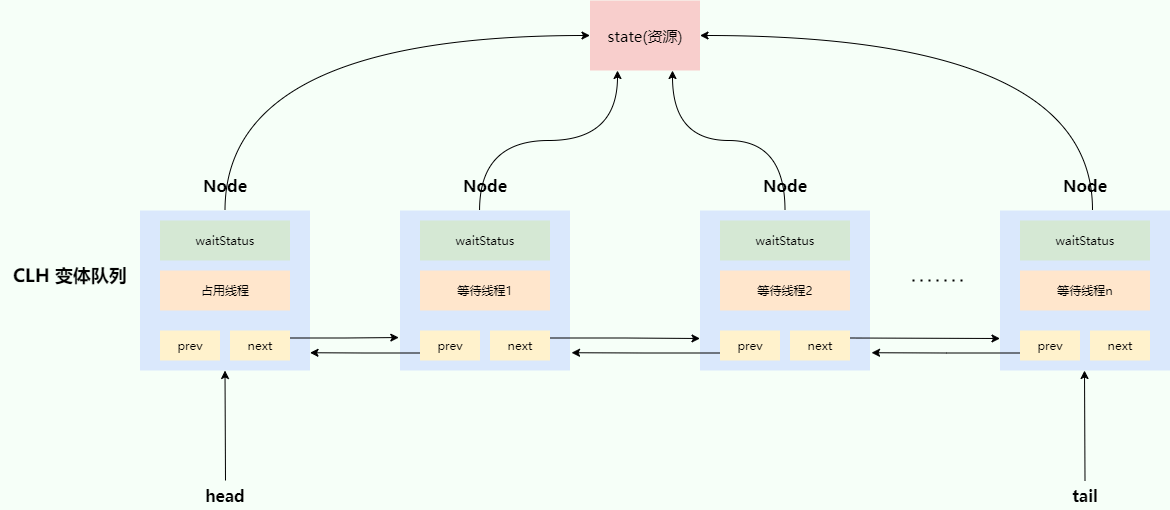
AQS(`AbstractQueuedSynchronizer`)的核心原理图:
|
||||
|
||||
|
||||
|
||||
AQS 使用 **int 成员变量 `state` 表示同步状态**,通过内置的 **线程等待队列** 来完成获取资源线程的排队工作。
|
||||
|
||||
@ -952,7 +958,7 @@ protected final boolean compareAndSetState(int expect, int update) {
|
||||
|
||||
以 `ReentrantLock` 为例,`state` 初始值为 0,表示未锁定状态。A 线程 `lock()` 时,会调用 `tryAcquire()` 独占该锁并将 `state+1` 。此后,其他线程再 `tryAcquire()` 时就会失败,直到 A 线程 `unlock()` 到 `state=`0(即释放锁)为止,其它线程才有机会获取该锁。当然,释放锁之前,A 线程自己是可以重复获取此锁的(`state` 会累加),这就是可重入的概念。但要注意,获取多少次就要释放多少次,这样才能保证 state 是能回到零态的。
|
||||
|
||||
再以 `CountDownLatch` 以例,任务分为 N 个子线程去执行,`state` 也初始化为 N(注意 N 要与线程个数一致)。这 N 个子线程是并行执行的,每个子线程执行完后`countDown()` 一次,state 会 CAS(Compare and Swap) 减 1。等到所有子线程都执行完后(即 `state=0` ),会 `unpark()` 主调用线程,然后主调用线程就会从 `await()` 函数返回,继续后余动作。
|
||||
再以 `CountDownLatch` 以例,任务分为 N 个子线程去执行,`state` 也初始化为 N(注意 N 要与线程个数一致)。这 N 个子线程是并行执行的,每个子线程执行完后`countDown()` 一次,state 会 CAS(Compare and Swap) 减 1。等到所有子线程都执行完后(即 `state=0` ),会 `unpark()` 主调用线程,然后主调用线程就会从 `await()` 函数返回,继续后续动作。
|
||||
|
||||
### Semaphore 有什么用?
|
||||
|
||||
|
||||
Loading…
x
Reference in New Issue
Block a user